通信技術の発達とIoT技術の進歩は、自動車の燃費や安全性向上に向けたエレクトロニクス化と相まって、クルマの自動運転化に向けた道を切り開いた。クルマの自動運転には段階が存在するが、例えばSAEが定義する6段階の最上位に位置するのが「完全自動運転」(レベル5)であり、それが実現されるのは、まだまだ先と言われている。
しかし、着実に研究開発は進んでおり、OEM(自動車)メーカーやTier1以外の半導体メーカーやEDAベンダも自動運転車を続々と公開している。その最たる例となる半導体企業がGPUで有名なNVIDIAであろう。現在、GPUを活用したディープラーニングを用いた人工知能(AI)に注目が集まっており、同社はその中心にいる企業の1社と言え、「BB8」と名付けられた自動運転車を公開しているほか、メルセデス・ベンツと共同で2017年内にも人工知能(AI)を搭載した自動車製品を発表するとしている。また、Intelも先般、イスラエルMobileyeの買収を発表。BMW Group、Mobileyeの3社で進めている自動運転車開発を2社とすることで加速させることを発表している。
ただし、自動車に実際にシステムを搭載する場合、悪意のある攻撃や故障に対する冗長性の確保や、低コスト化、低消費電力化、耐環境性など、さまざまなニーズを満たす必要がある。そうした実車に搭載できるシステム、という角度からアプローチをしかけているのがルネサス エレクトロニクスやNXP Semiconductors(旧Freescale Semiconductor)といった従来から車載マイコンで強みを有している半導体企業だ。Freescaleは、例年開催してきたFTFなどで、そうした取り組みなどを公開してきた一方、ルネサスは日本企業ということもあるのか、少なくとも国内では、ラジコンでのデモなど、実車ではない形での技術の披露の仕方が主だったものとなっていた(米国では実車デモをすでに披露している)。
そんなルネサスだが、2017年1月に米国で開催されたCES 2017にて、自社のSoC「R-Car H3」を2基と車載制御用マイコン「RH850/P1H-C」を1基搭載した自動運転開発プラットフォーム「HAD(Highly Automated Driving:高度自動運転)プラットフォーム」2台とV2X通信システムを搭載したフォードのリンカーンをベースとした自動運転車を公開。他社の自動運転向けシステムとは消費電力が文字通り桁違いに低い25W (HADプラットフォーム2台の消費電力)で実現できることを示した。
このルネサス製の自動運転車、2017年4月6日時点では、実は日本に持ち込まれており、同社の事業所内にて、テストなどが行われており、今回、日本のメディアに向けて、国内で初めてデモ走行が公開された。筆者も実際に試乗させてもらったが、自動運転車の開発プラットフォームとして考えた場合の必要な機能は、走りそのものも含めて、十分といえるものであった。

|

|

|

|

|

|
|
リンカーンをベースに開発されたルネサスの自動運転車の概観。日本で初めてのデモ走行が行われた |
||
システムの構成としては、今回のソリューションでは低消費電力なマルチプロセッサ構成で、ASIL-Dに対応するフェールオペレーションを自動運転車に搭載することを目的としており、ミリ波レーダー、LiDAR、光学カメラ、そしてV2XをHADプラットフォーム上で処理するという仕組みを採用している。具体的には、今回のソリューションでは、合計4つのR-Car H3があるが、その内1つをカメラからの入力に対するセンサフュージョンの役割を担当させ、残りの3つで、レーダー、Lider、V2Xを冗長性を持たせた形で担当する。

|

|

|

|
|
ルーフに搭載された各種機器。黒い円筒形のものがLiDAR、手前の白い丸いものがGPS、黒い四角がV2X、黒いアンテナがGPSステーションとの通信(一番右の画像がGPSステーション)、白い三角錐が米国におけるGPSとなっている。前方撮影用のカメラは後付けとのこと |
|||
このため、もし、3つのうち、どれか1つのR-Car H3が故障などによる機能停止状態に陥っても、残りの2つで判断を行い、自動車を安全な場所まで誘導する、といった緊急対応を図ることを可能としている。さらに、V2Xとしては、一般的なギガビットイーサネットで接続し、その先にあるクラウド環境と接続するが、通信パケットをRH850が監視。クルマが外部からサイバー攻撃を受けた場合、通常とは異なるパケットなどを同マイコンが検知することで、そのパケットを破棄する、といった仕組みで、不正なデータの侵入を防ぐことを可能としている。

|

|
|
自動走行時の車内の様子。左はLiDARによって得られた周辺画像情報 |
|

|

|

|

|
|
左列の上段が見づらいが、R-Car H3の1つが駄目になった状態のシステムの状況、下段がサイバーアタックを受けているアラートを出している状況。いずれの状況も、路肩に自動的に自動車を寄せて、停止することで安全を確保する |
|

|

|

|
|
自動運転車の機能概要。1つのR-Car H3に何かあっても、安全な走行を可能とする仕組みとなっているほか、イーサネット上のサイバー攻撃に対しては、RH850でパケットを監視することで、正常かどうかを判断することで対応する |
||
ちなみに自動運転車としての開発は2016年9月ころから、とのことで、約3カ月の開発期間で、年明けのCESに間に合わせたこととなる。

|
|
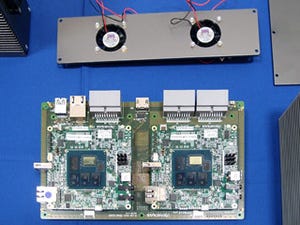
手前の2つの箱がHADプラットフォーム。後ろの薄い箱がV2Xコントローラ。HADプラットフォーム1台あたりの消費電力は12.5W。1つでもASIL-Dの要件には対応できるが、2つに分けている理由はシステムとしての堅牢性の確保の意味合いがあるとのこと |
なお、ルネサスは2017年4月11日に、東京にて開催される同社のプライベートイベント「Renesas DevCon Japan 2017」にて、この自動運転車を展示する予定だという。また、今回のクルマは、前方の検知のみを行って、走行処理を行う、というものであったが、2018年にはR-Car H3を8基使うことで、アラウントビュー(両サイド)や後方の検知なども行える(例えば、前方でR-Car H3を3基、後方で3基、両サイドで2基で、それぞれ独立して冗長性を確保しつつ、統合コントロールを実施する)構成を実現していきたい、としており、対応するセンサの種類なども増やして、より完全な自動運転の実現に向けて技術を高めていきたいとしている。

|

|

|
|
自動運転デモカーのロードマップと、今回披露されたデモのシナリオ。2018年にはR-Car H3 8コアで、前方だけでなく全方位対応などを図る予定としている |
||
自動運転の車内風景その1。一時停止の標識を認識し、自動で停止する様子と、信号が赤であることを確認し、自動で停止する様子
自動運転の車内風景その2。R-Car H3の1つが停止した場合の走行の様子。異常事態を検知し、安全な場所まで走行している
自動運転の風景その1。赤信号で一時停止し、青信号に変わると、自動でスタートする様子
自動運転の風景その2。前方に障害物(自動車)がある場合、停止/スローダウンし、障害物がなくなると、自動的に再スタートする様子と、一時停止標識を識別して、停止する様子
自動運転の風景その3。緊急事態発生時に、自動的に安全地帯へと避難する様子