神奈川工科大学山本研究室・ウェアラブルパワーアシストスーツ
続いては、身体装着型のアシストスーツやリハビリ支援ロボットを紹介しよう。まずは、神奈川工科大学ロボット・メカトロニクス学科の山本圭治郞教授の研究室から。同研究室では、空気圧を利用した全身装着型の「ウェアラブルパワーアシストスーツ」(WPAS)を長年にわたって開発しているが、今年もその最新バージョンを出展(画像17~20)。特に肩の関節機構が昨年のものから大きく変えられており、より人の動きに追随しやすくなっているという。

|

|
|
画像17。空気圧を利用した介護者用の「ウェアラブルパワーアシストスーツ」の2011バージョン。背面のシステムを見ると重そうだが、全身装着型のため装着者にはシステムの重量はかからない設計。ただし全身で装着するので、拘束感はどうしても発生してしまう |
画像18。真横から見た上半身。エアバッグを蛇腹のようにいくつもつなげた空気圧アクチュエータのために「メカのかたまり」感がかなりある |

|

|
|
画像19。真横から見た下半身。フレームが足裏までつながっているのがわかるだろうか。これでシステムの重量は装着者にかからないようになっている |
画像20。背面。このメカニカルな感じは、ロボット好き、とりわけパワードスーツ好きにはちょっと来るものがある |
介護は重労働で、腰を痛めてしまうことが多いという話はよく聞くかと思うが、そうしたことをなくすために介護者用に開発しているのが同スーツで、機械システムは極力背面に装備し、患者や要介護者とのスキンシップを妨げないよう設計されているのが特徴。空圧式なのでアシスト力に対して柔らかいのも特徴で、安全性が高い。また、必要とする関節トルクを安全確実にスーツ側が検知するため、関節駆動筋肉の表皮に新開発の「筋肉硬さセンサ」を配置し、各筋肉が発揮している筋力を検出し、それと身体力学計算モデルによる各関節トルク値の算出を行っている。
なお、今回は実機モデルはなかったのだが、製品版の開発も進められており、股関節、ヒザ関節、足首関節の屈伸と上腕の屈曲運動をアシストする仕組みを持った、WPASよりも非常にスッキリした形の「アシストレッグ」が近いうちに登場するという。
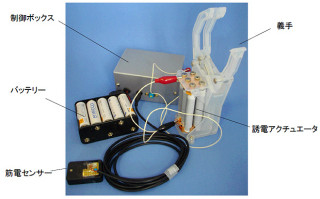
また、全身装着型に先行してすでに製品化されているのが、「ペローズ式パワーアシストハンド」だ(画像21~24)。こちらはリハビリ用途で、健常な手の動きを、生涯のある側にマスター・スレーブ方式で伝えて訓練を行う使い方をする。

|

|
|
画像21。グローブに装着して利用する形だ。金属パーツはあまりないために軽い |
画像22。空気が送り込まれると蛇腹部分が伸びて指を屈曲する |

|

|
|
画像23。逆に空気が吸引されて蛇腹部分が縮むと、指が伸びる。パワーはないので安全性も高く、リハビリ用途に適している |
画像24。アトムプロジェクトの看板娘のポップ。将来的には、ウェアラブルパワーアシストスーツをこのぐらいスッキリさせたいというイメージでもあるようだ |
パワーアシストハンドも空気圧を利用しており、パイプと蛇腹部分で構成されたアクチュエータが指1本1本の外側に配置する形(装着者はグローブをはめる)で、低圧ポンプで空気を吹き込むことで指を曲げる方向に力働き、吸引することで指が伸びるようになっている。空気圧なので安全性が高く、過剰な負担をかける心配がなく、自然な身体動作を妨げないといった点がポイントとなっている。
神奈川工科大学のお膝元である神奈川県厚木市の企業と山本研究室で結成した有限責任事業組合アトムプロジェクトが販売およびレンタル・リース事業を実施中。販売価格は28万5000円で、レンタル・リース料金は1カ月1万3000円からだ。