下半身付随で長年車いす生活を送っていた人が、立ち上がり、歩けるようになり、さらには国際的なスポーツ大会に挑む。そんな劇的な変化をもたらしたのは、近年注目されているロボティクス装具だった。
米・ロサンゼルスで開催されているSOLIDWORKSの年次イベント「SOLIDWORKS WORLD 2018」(2月4日~7日(現地時間))にて、同社の起業プログラムを活用して開発されているロボティクス義足のプレゼンテーションが行われた。
-
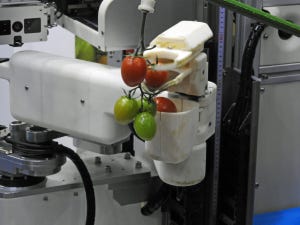
韓国・西江大学の洪教授が立ち上げた「SG ROBOTICS」。背景の写真は、ロボティクス義足「WALKON」を装着して競技に挑んでいる様子。
-
韓国・西江大学の洪教授


開発者は、韓国・西江大学 機械工学科のKyoungchul Kong教授(以下、洪教授)。歩行困難にある人たちのためのロボットの開発を行っており、そのための会社「SG ROBOTICS」を起業している。現在、下半身不随の人向けロボティクス義足「WALKON」と、高齢者向けのロボティクススーツ「ANGELEGS」の開発を進めている。
下半身不随の人が歩くためのロボット
冒頭に紹介したのは、「WALKON」という製品のエピソード。事故で下半身の感覚がまったくなくなっていたその人は、2カ月でこの機器の装着に順応し、歩けるようになった。装着者に足の感覚がないことから、歩行の動作の制御はすべてロボット側で行う。
「制御自体は実は難しくない」、と語る洪教授。装着者自身がボタンを押してモードを選択すると、定められた動きにしたがって動き出す。その一方で、歩行を完全にアシストするためにはロボットとしての出来ばえが非常に重要になるため、設計の要求が高いのだという。アクチュエーションの効率が非常に高いことが、この機体の特筆すべきスペックだと強調した。
階段や坂道などの障害に行き当たった際は、センサで検知した上で、強制的に操作するのではなく、適切な歩行モードの提案を行う。モード選択は首からさげたディスプレイを介して行っていたが、逐一俯いて確認する手間をなくすために、スマートグラスを使って見られるようにした。
-
「WALKON」の概要
-
装着者が操作時に参照するUIをタブレットのような端末からスマートグラスにし、利便性を向上した


当初、理論上は正しく動くはずの「WALKON」の歩行動作を、装着者は動きが不自然だと嫌がったことがあったと明かした洪教授。それは20年車いすで暮らしていたために、彼の関節の可動域が健常者のそれよりも狭く、彼自身の歩行のパターンが健常者の歩き方をベースとしたロボットの動きとは異なることが原因だった。
健常者は歩行時にやや後傾の姿勢になるが、これは足首を使って前に推進する力が強く働いているため。足首の関節は複雑な構造になっているため、同様の機構をロボットに備えつけるのは難しい。すでに商用化されている他社の介助用ロボットは足首がある前提で作られているため、体重が後ろ側に乗ってしまい、そうなった時支える人が必要になっているという。
そこで洪教授は前傾姿勢での歩行が適切だと考え、重心をあくまで前足にかけるように再設計した。そうしたことで、膝をあげても後ろに転ばずに歩行できるようになった。こうして、装着者はサイバスロン(障害を負った人がロボット義肢などを用いて競技に挑む国際大会)で優秀な成績を収めることが出来た。
この機器は直接体につけるのではなく、病院で作った装具を介して装着すため、すでに別の人の装着実績もあるという。足に感覚がわずかに残っている人が装着した際には、たった2日で歩行を会得したというエピソードも明かされた。
生体情報なしで制御するロボティクススーツ
高齢者向けのロボティクススーツ「ANGELEGS」は、前述のものと違い、筋肉は弱っているものの自分で足を動かせる人を想定しているため、制御系が装着者自身の脳とロボットのふたつ存在することになる。そのため、このデバイスにおいては設計ではなく、制御の方に課題が多くあったという。人間の動きを追随し、必要なときだけ補助をする仕組みとなっており、現在はIoTを活用してモニタリングの精度を加速させようとしている。
-
「ANGELEGS」概要
-
「ANGELEGS」の実物がステージ上でお披露目された。


こうした身体能力を補助するロボティクススーツは既にさまざまな企業がリリースしているが、「ANGELEGS」の大きな特徴として、人間の生体情報を取得するバイオセンサを使っていない点がある。
バイオセンサは生体情報から装着者の意図がすぐに把握できるメリットはあるものの、センサを皮膚に接触させることが必須となるため、発汗などで取得する値に変動が起こってしまうこと、装着時に数値測定の初期化を行う必要があるといったデメリットも存在する。
そこで人体の動きを数学的に計算し、メカニカルセンサのみで稼働する方法を採った。人体の動きのパラメータ化に課題があったというが、体格によって平均的な歩行動作の傾向は推し量れたため、身長・体重といったふたつの数値を元に調整している。
-
実際に装着した高齢者が出演したニュース映像。現在も「ANGELEGS」を使って生活を送っているという。
-
「ANGELEGS」の設計は一貫してSOLIDWORKSで行われた。


これらふたつの機器の設計は、SOLIDWORKSを使って行われた。特に「ANGELEGS」において、洪教授はその利点として「3Dプリンティングが大変行いやすい」ことを挙げた。それにより装着者に合わせたカスタマイズがしやすく、体をスキャンしたデータをインポートし、3Dプリントをスムーズに行えたと語った。3Dスキャンから機械および電気回路の設計、そして最終製品の出力まで合わせて約5時間で行うことができたという。
次は子供向けロボットの開発
ロボティクスによって老いや身体障害の不便をなくすため、研究や起業と忙しく働く洪教授。彼は今学期、大学における授業を持っていないという。韓国では起業を後押しする制度があり、大学の教授が起業したいとなれば、大学はその支援を行うべきであるという法もある。同氏の会社の株を大学が保有しており、業績も論文数だけでなく起業やその業績も考慮される。
最後に、直近の動きとして、子供向けのロボティクススーツのプロジェクトを立ち上げたばかりと語った。あくまで現段階での構想、と前置きした上で、「ANGELEGS」の小型化を想定しているという。また、現行の2機種の市場投入について尋ねたところ、市場で販売できるような価格帯を目指して改良を続けていくとのコメントが得られた。製品の市販をはじめ、同氏の今後の活躍に期待したい。